
1 排序算法的介绍
排序也称排序算法(Sort Algorithm), 排序是将一组数据, 依指定的顺序进行排列的过程。
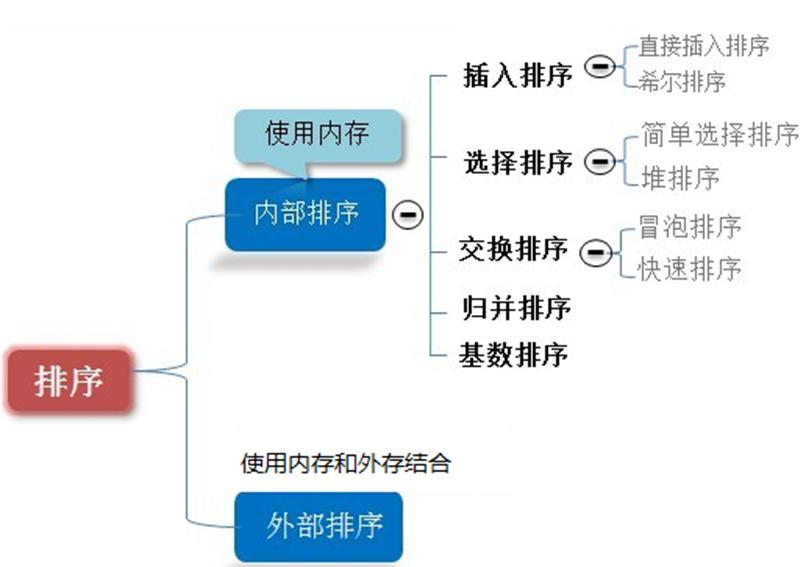
2 排序的分类:
指将需要处理的所有数据都加载到内部存储器(内存)中进行排序。
2) 外部排序法:
数据量过大, 无法全部加载到内存中, 需要借助外部存储(文件等)进行排序。
3) 常见的排序算法分类
3 算法的时间复杂度
3.1度量一个程序(算法)执行时间的两种方法
1) 事后统计的方法
这种方法可行, 但是有两个问题: 一是要想对设计的算法的运行性能进行评测, 需要实际运行该程序; 二是所得时间的统计量依赖于计算机的硬件、 软件等环境因素, 这种方式, 要在同一台计算机的相同状态下运行, 才能比较那个算法速度更快。
2) 事前估算的方法
通过分析某个算法的时间复杂度来判断哪个算法更优.
3.2时间频度
基本介绍
时间频度: 一个算法花费的时间与算法中语句的执行次数成正比例, 哪个算法中语句执行次数多, 它花费时间就多。 一个算法中的语句执行次数称为语句频度或时间频度。 记为 T(n)。
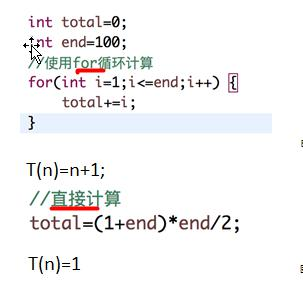
举例说明 -基本案例
比如计算 1-100 所有数字之和, 我们设计两种算法:
举例说明-忽略常数项
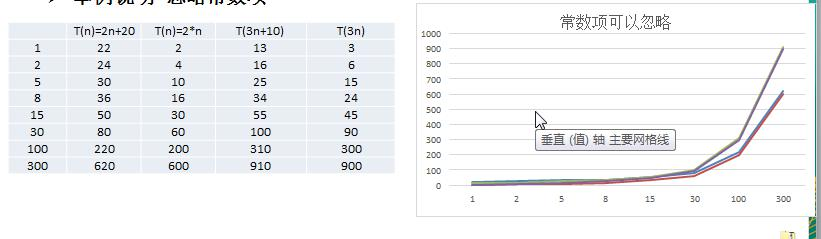
结论:
1) 2n+20 和 2n 随着 n 变大, 执行曲线无限接近, 20 可以忽略
2) 3n+10 和 3n 随着 n 变大, 执行曲线无限接近, 10 可以忽略举例说明-忽略低次项
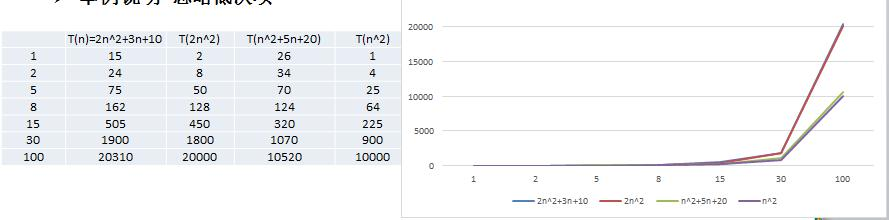
结论:
1) 2n^2+3n+10 和 2n^2 随着 n 变大, 执行曲线无限接近, 可以忽略 3n+10
2) n^2+5n+20 和 n^2 随着 n 变大,执行曲线无限接近, 可以忽略 5n+20举例说明-忽略系数
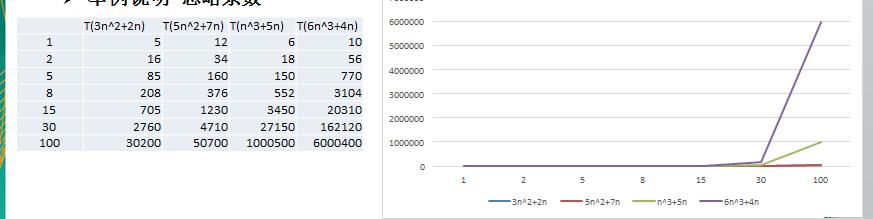
结论:
1) 随着 n 值变大, 5n^2+7n 和 3n^2 + 2n , 执行曲线重合, 说明 这种情况下, 5 和 3 可以忽略。
2) 而 n^3+5n 和 6n^3+4n , 执行曲线分离, 说明多少次方式关键
3.3时间复杂度
1) 一般情况下, 算法中的基本操作语句的重复执行次数是问题规模 n 的某个函数, 用 T(n)表示, 若有某个辅助函数 f(n), 使得当 n 趋近于无穷大时, T(n) / f(n) 的极限值为不等于零的常数, 则称 f(n)是 T(n)的同数量级函数。记作 T(n)=O ( f(n) ), 称O ( f(n) ) 为算法的渐进时间复杂度, 简称时间复杂度。
2) T(n) 不同, 但时间复杂度可能相同。 如: T(n)=n²+7n+6 与 T(n)=3n²+2n+2 它们的 T(n) 不同, 但时间复杂度相同, 都为 O(n²)。
3) 计算时间复杂度的方法:
- 用常数 1 代替运行时间中的所有加法常数 T(n)=n²+7n+6 => T(n)=n²+7n+1
- 修改后的运行次数函数中, 只保留最高阶项 T(n)=n²+7n+1 => T(n) = n²
- 去除最高阶项的系数 T(n) = n² => T(n) = n² => O(n²)
3.4常见的时间复杂度
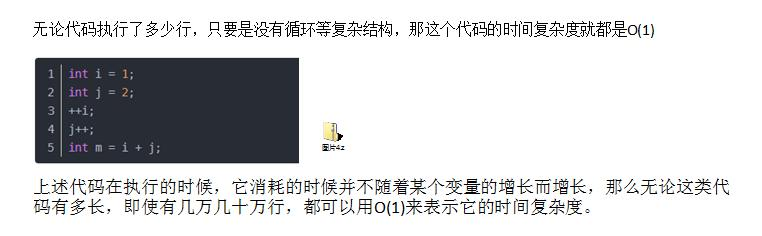
- 常数阶 O(1)
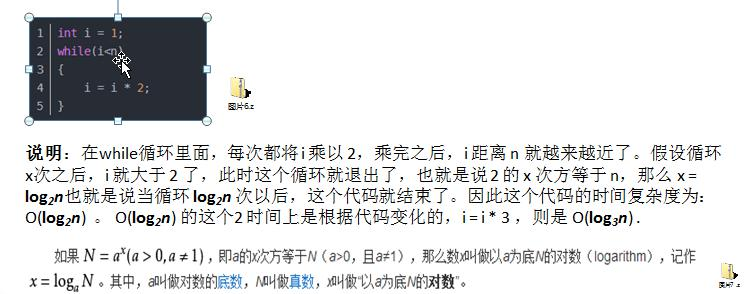
- 对数阶 O(log2n)
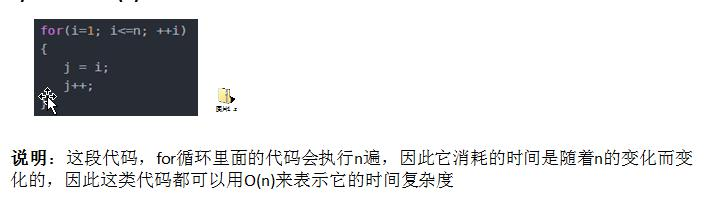
- 线性阶 O(n)
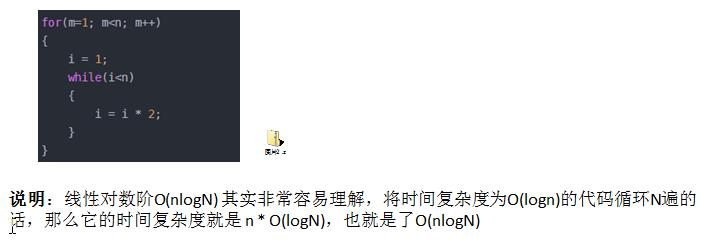
- 线性对数阶 O(nlog2n)
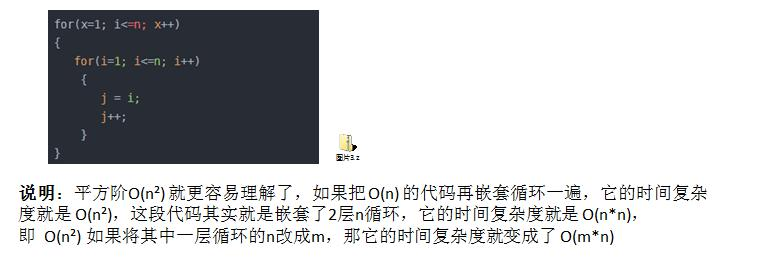
- 平方阶 O(n^2)
- 立方阶 O(n^3)
- k 次方阶 O(n^k)
- 指数阶 O(2^n)
常见的时间复杂度对应的图:
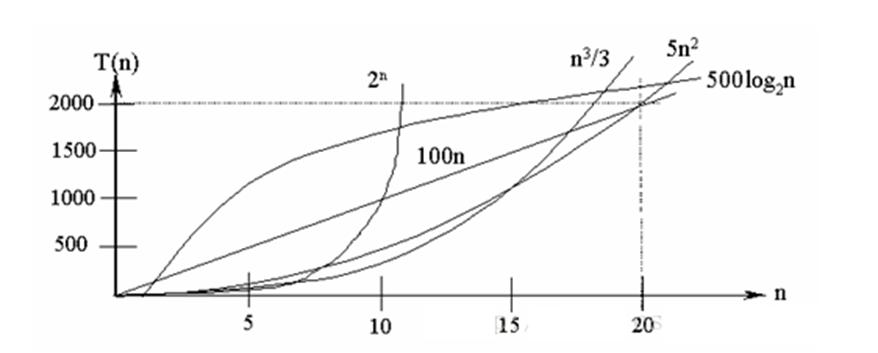
说明:
1) 常见的算法时间复杂度由小到大依次为: Ο (1)<Ο (log2n)<Ο (n)<Ο (nlog2n)<Ο (n2)<Ο (n3)< Ο (nk) <Ο (2n) , 随着问题规模 n 的不断增大, 上述时间复杂度不断增大, 算法的执行效率越低
2) 从图中可见, 我们应该尽可能避免使用指数阶的算法
1) 常数阶 O(1)
2) 对数阶 O(log2n)
3) 线性阶 O(n)
4) 线性对数阶 O(nlogN)
5) 平方阶 O(n²)
6) 立方阶 O(n³)、 K 次方阶 O(n^k)
说明: 参考上面的 O(n²) 去理解就好了, O(n³)相当于三层 n 循环, 其它的类似
3.5平均时间复杂度和最坏时间复杂度
1) 平均时间复杂度是指所有可能的输入实例均以等概率出现的情况下, 该算法的运行时间。
2) 最坏情况下的时间复杂度称最坏时间复杂度。 一般讨论的时间复杂度均是最坏情况下的时间复杂度。 这样做的原因是: 最坏情况下的时间复杂度是算法在任何输入实例上运行时间的界限, 这就保证了算法的运行时间不会比最坏情况更长。
3) 平均时间复杂度和最坏时间复杂度是否一致, 和算法有关(如图:)。
4 算法的空间复杂度简介
4.1基本介绍
1) 类似于时间复杂度的讨论, 一个算法的空间复杂度(Space Complexity)定义为该算法所耗费的存储空间, 它也是问题规模 n 的函数。
2) 空间复杂度(Space Complexity)是对一个算法在运行过程中临时占用存储空间大小的量度。 有的算法需要占用的临时工作单元数与解决问题的规模 n 有关, 它随着 n 的增大而增大, 当 n 较大时, 将占用较多的存储单元, 例如快速排序和归并排序算法, 基数排序就属于这种情况
3) 在做算法分析时, 主要讨论的是时间复杂度。 从用户使用体验上看, 更看重的程序执行的速度。 一些缓存产品(redis, memcache)和算法(基数排序)本质就是用空间换时间.
5 冒泡排序
5.1基本介绍
冒泡排序(Bubble Sorting) 的基本思想是: 通过对待排序序列从前向后(从下标较小的元素开始) ,依次比较相邻元素的值, 若发现逆序则交换, 使值较大的元素逐渐从前移向后部, 就象水底下的气泡一样逐渐向上冒。
优化:
因为排序的过程中, 各元素不断接近自己的位置, 如果一趟比较下来没有进行过交换, 就说明序列有序, 因此要在排序过程中设置一个标志 flag 判断元素是否进行过交换。 从而减少不必要的比较。 (这里说的优化, 可以在冒泡排序写好后, 再进行)
5.2演示冒泡过程的例子(图解)
小结上面的图解过程:
(1) 一共进行 数组的大小-1 次 大的循环
(2)每一趟排序的次数在逐渐的减少
(3) 如果我们发现在某趟排序中, 没有发生一次交换, 可以提前结束冒泡排序。 这个就是优化
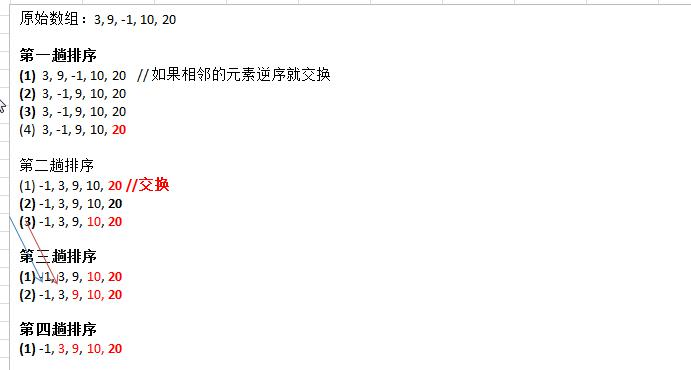
5.3冒泡排序应用实例
我们举一个具体的案例来说明冒泡法。 我们将五个无序的数: 3, 9, -1, 10, -2 使用冒泡排序法将其排成一个从小到大的有序数列。
1 | public static void bubbleSort(int[] arr) { |
6 选择排序
6.1基本介绍
选择式排序也属于内部排序法, 是从欲排序的数据中, 按指定的规则选出某一元素, 再依规定交换位置后达到排序的目的。
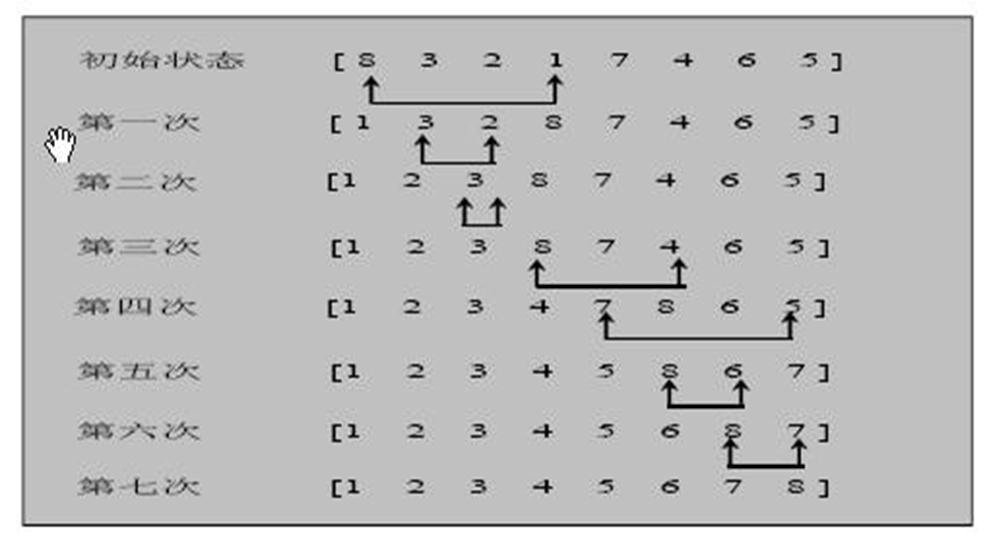
6.2选择排序思想:
选择排序(select sorting) 也是一种简单的排序方法。 它的基本思想是: 第一次从 arr[0]arr[n-1]中选取最小值,与 arr[0]交换, 第二次从 arr[1]arr[n-1]中选取最小值, 与 arr[1]交换, 第三次从 arr[2]arr[n-1]中选取最小值, 与 arr[2]交换, …, 第 i 次从 arr[i-1]arr[n-1]中选取最小值, 与 arr[i-1]交换, …, 第 n-1 次从 arr[n-2]~arr[n-1]中选取最小值,与 arr[n-2]交换, 总共通过 n-1 次, 得到一个按排序码从小到大排列的有序序列。
6.3选择排序思路分析图:
对一个数组的选择排序再进行讲解
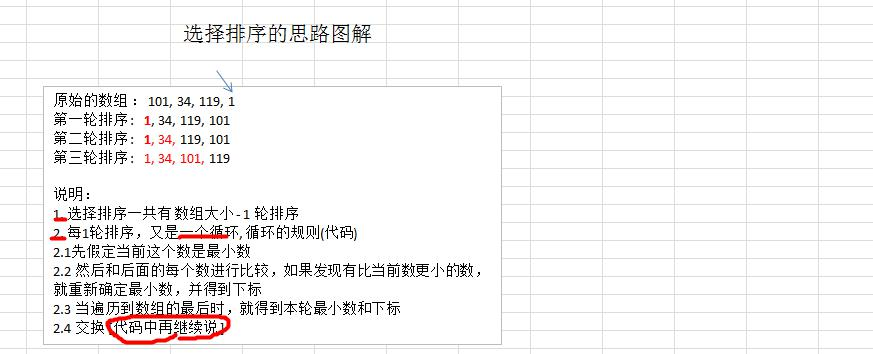
6.4选择排序应用实例:
有一群牛 , 颜值分别是 101, 34, 119, 1 请使用选择排序从低到高进行排序 [101, 34, 119, 1]
代码实现
1 | private static void selectSort(int[] arr) { |
7 插入排序
7.1插入排序法介绍:
插入式排序属于内部排序法, 是对于欲排序的元素以插入的方式找寻该元素的适当位置, 以达到排序的目的。
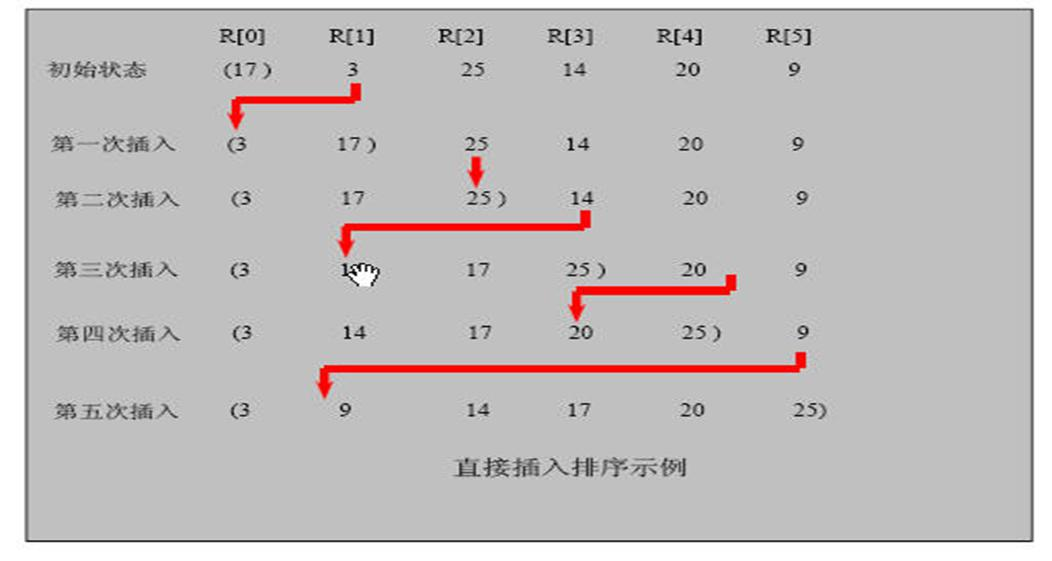
7.2插入排序法思想:
插入排序(Insertion Sorting) 的基本思想是: 把 n 个待排序的元素看成为一个有序表和一个无序表, 开始时有序表中只包含一个元素, 无序表中包含有 n-1 个元素, 排序过程中每次从无序表中取出第一个元素, 把它的排序码依次与有序表元素的排序码进行比较, 将它插入到有序表中的适当位置, 使之成为新的有序表。
7.3插入排序思路图:
7.4插入排序法应用实例:
1 | private static void insertSort(int[] arr) {//668 |
8 希尔排序
8.1简单插入排序存在的问题
我们看简单的插入排序可能存在的问题.
数组 arr = {2,3,4,5,6,1} 这时需要插入的数 1(最小), 这样的过程是:
{2,3,4,5,6,6}
{2,3,4,5,5,6}
{2,3,4,4,5,6}
{2,3,3,4,5,6}
{2,2,3,4,5,6}
{1,2,3,4,5,6}
结论: 当需要插入的数是较小的数时, 后移的次数明显增多, 对效率有影响
8.2希尔排序法介绍
希尔排序是希尔(Donald Shell) 于 1959 年提出的一种排序算法。 希尔排序也是一种插入排序, 它是简单插入 排序经过改进之后的一个更高效的版本, 也称为缩小增量排序。
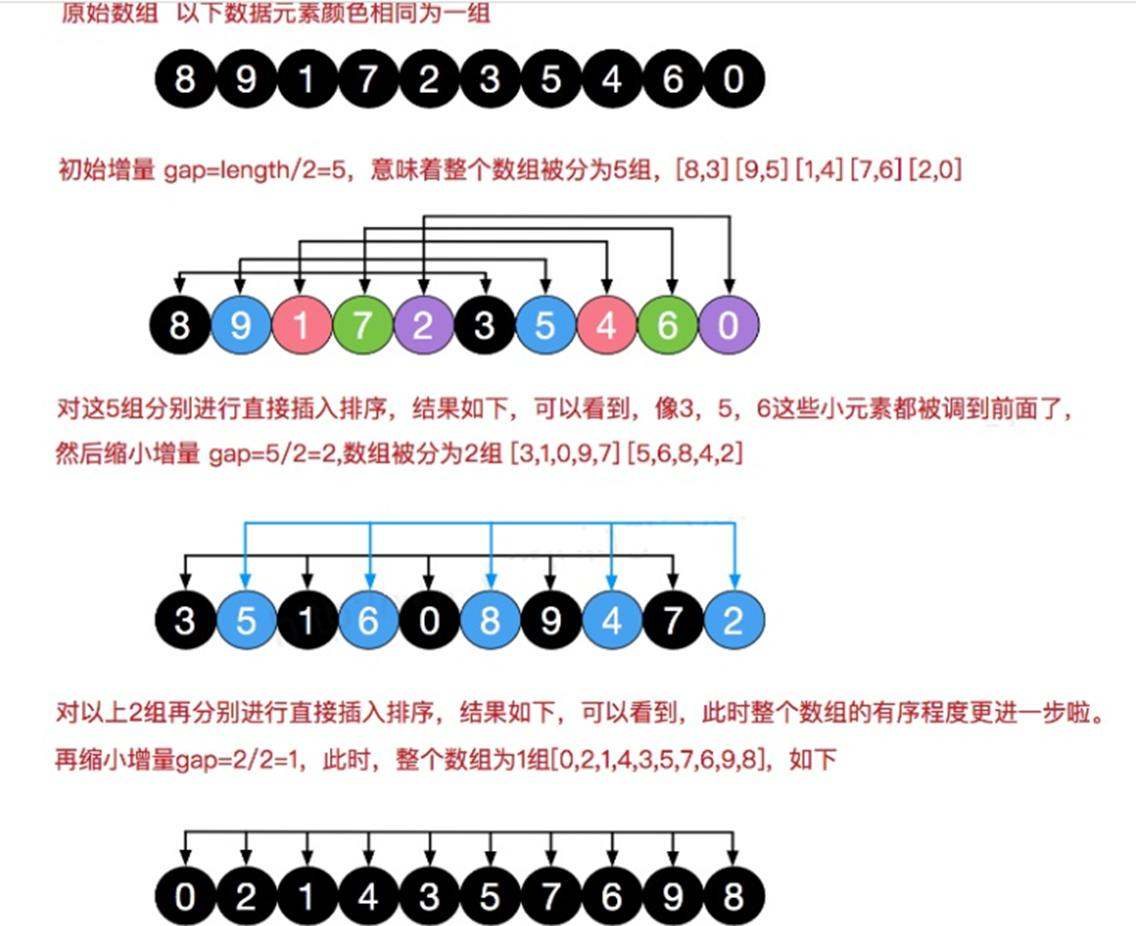
8.3希尔排序法基本思想
希尔排序是把记录按下标的一定增量分组, 对每组使用直接插入排序算法排序; 随着增量逐渐减少, 每组包含
的关键词越来越多, 当增量减至 1 时, 整个文件恰被分成一组, 算法便终止

8.5希尔排序法应用实例
有一群小牛, 考试成绩分别是 {8,9,1,7,2,3,5,4,6,0} 请从小到大排序. 请分别使用
1) 希尔排序时, 对有序序列在插入时采用交换法, 并测试排序速度.
2) 希尔排序时, 对有序序列在插入时采用移动法, 并测试排序速度
3) 代码实现
1 | public static void shellSort(int[] arr) { //17 |
9 快速排序
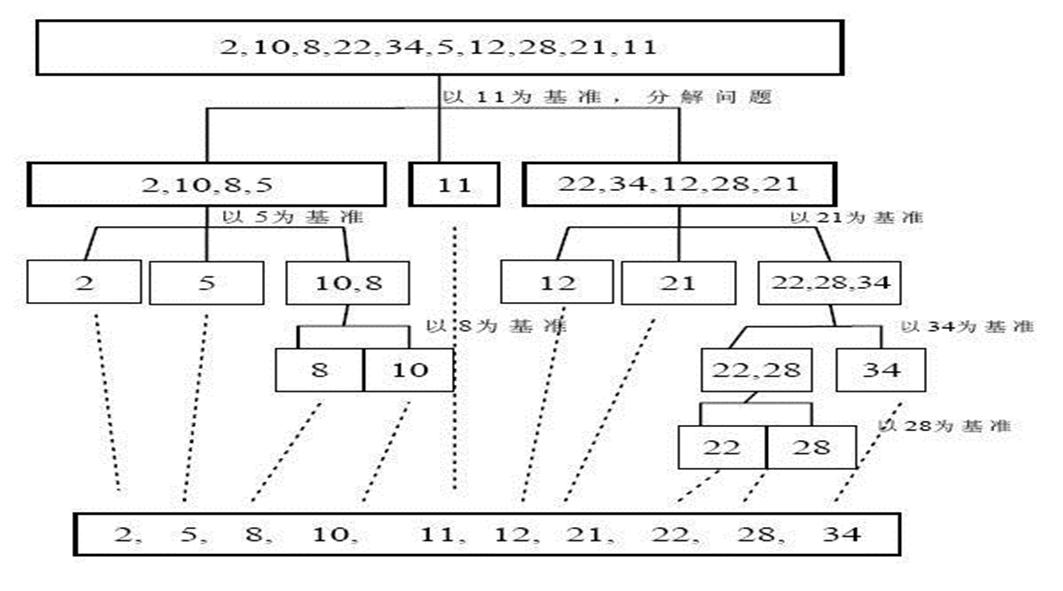
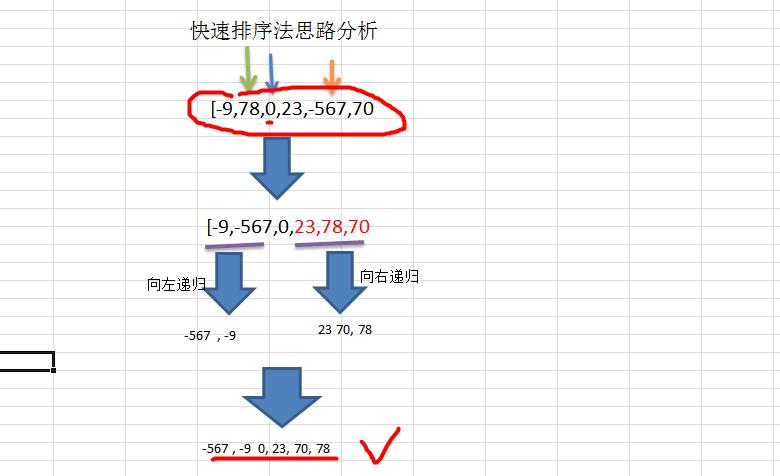
9.1快速排序法介绍:
快速排序(Quicksort) 是对冒泡排序的一种改进。 基本思想是: 通过一趟排序将要排序的数据分割成独立的两部分, 其中一部分的所有数据都比另外一部分的所有数据都要小, 然后再按此方法对这两部分数据分别进行快速排序, 整个排序过程可以递归进行, 以此达到整个数据变成有序序列
9.2快速排序法示意图:
9.3快速排序法应用实例:
1 | private static void quickSort(int[] arr, int start, int end) { |
这里发现一个用异或交换值的小坑 当交换的两个值是同一个内存中的对象 异或交换就会失效
原理:第一次异或两个值同时为0
10 归并排序
10.1 归并排序介绍:
归并排序(MERGE-SORT) 是利用归并的思想实现的排序方法, 该算法采用经典的分治(divide-and-conquer)策略(分治法将问题分(divide)成一些小的问题然后递归求解, 而治(conquer)的阶段则将分的阶段得到的各答案”修补”在一起, 即分而治之)。
10.2 归并排序思想示意图 1-基本思想:

10.3 归并排序思想示意图 2-合并相邻有序子序列:
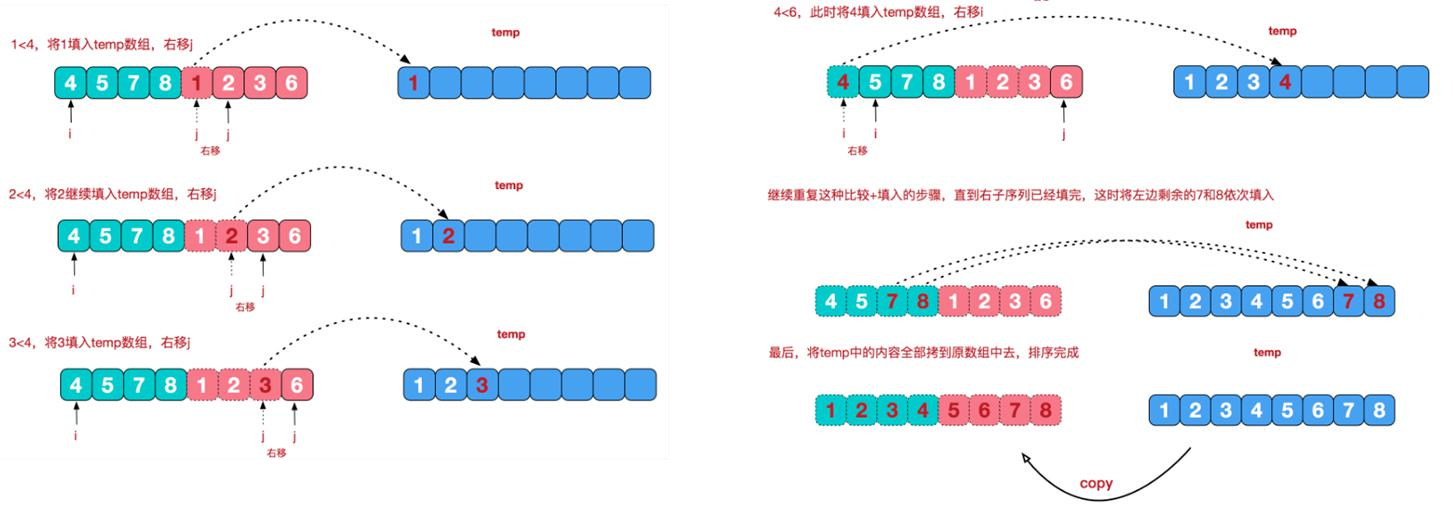
再来看看治阶段, 我们需要将两个已经有序的子序列合并成一个有序序列, 比如上图中的最后一次合并, 要将
[4,5,7,8]和[1,2,3,6]两个已经有序的子序列, 合并为最终序列[1,2,3,4,5,6,7,8], 来看下实现步骤
10.4 归并排序的应用实例
1 | package com.ming.sorting.algorithm; |
11 基数排序
11.1 基数排序(桶排序)介绍:
1) 基数排序(radix sort) 属于“分配式排序” (distribution sort) , 又称“桶子法” (bucket sort) 或 bin sort, 顾名思义, 它是通过键值的各个位的值, 将要排序的元素分配至某些“桶” 中, 达到排序的作用
2) 基数排序法是属于稳定性的排序, 基数排序法的是效率高的稳定性排序法
3) 基数排序(Radix Sort)是桶排序的扩展
4) 基数排序是 1887 年赫尔曼· 何乐礼发明的。 它是这样实现的: 将整数按位数切割成不同的数字, 然后按每个位数分别比较。
11.2 基数排序基本思想
1) 将所有待比较数值统一为同样的数位长度, 数位较短的数前面补零。 然后, 从最低位开始, 依次进行一次排序。这样从最低位排序一直到最高位排序完成以后, 数列就变成一个有序序列。
2) 这样说明, 比较难理解, 下面我们看一个图文解释, 理解基数排序的步骤
11.3 基数排序图文说明
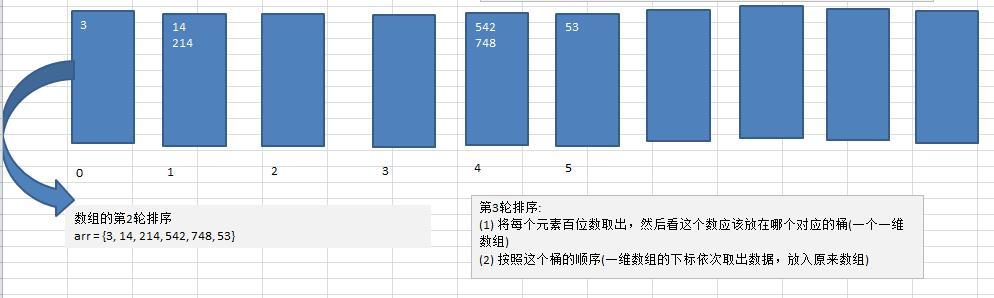
将数组 {53, 3, 542, 748, 14, 214} 使用基数排序, 进行升序排序


11.4 基数排序代码实现
1 | package com.ming.sorting.algorithm; |
11.5 基数排序的说明:
1) 基数排序是对传统桶排序的扩展, 速度很快.
2) 基数排序是经典的空间换时间的方式, 占用内存很大, 当对海量数据排序时, 容易造成 OutOfMemoryError 。
3) 基数排序时稳定的。 [注:假定在待排序的记录序列中, 存在多个具有相同的关键字的记录, 若经过排序, 这些记录的相对次序保持不变, 即在原序列中, r[i]=r[j], 且 r[i]在 r[j]之前, 而在排序后的序列中, r[i]仍在 r[j]之前,则称这种排序算法是稳定的; 否则称为不稳定的]
4) 有负数的数组, 我们不用基数排序来进行排序, 如果要支持负数, 参考: https://code.i-harness.com/zh-CN/q/e98fa9
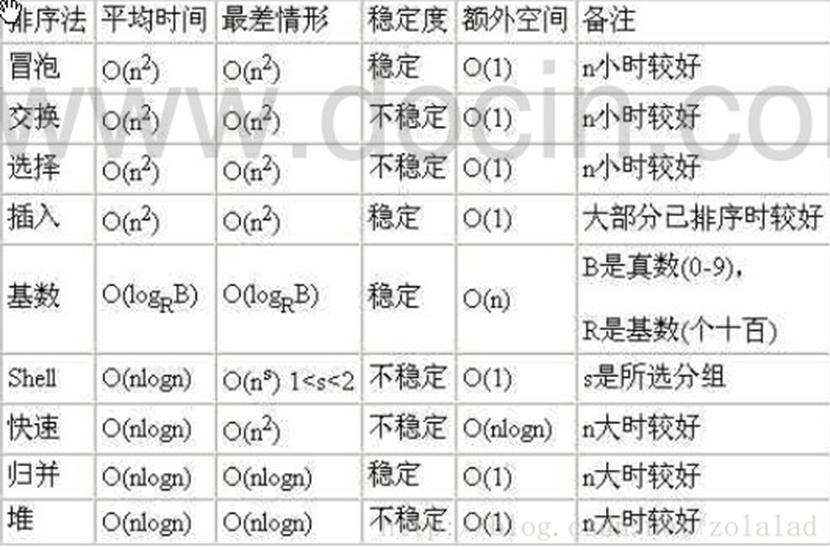
12 常用排序算法总结和对比
12.1 一张排序算法的比较图

12.2 相关术语解释:
1) 稳定: 如果 a 原本在 b 前面, 而 a=b, 排序之后 a 仍然在 b 的前面;
2) 不稳定: 如果 a 原本在 b 的前面, 而 a=b, 排序之后 a 可能会出现在 b 的后面;
3) 内排序: 所有排序操作都在内存中完成;
4) 外排序: 由于数据太大, 因此把数据放在磁盘中, 而排序通过磁盘和内存的数据传输才能进行;
5) 时间复杂度: 一个算法执行所耗费的时间。
6) 空间复杂度: 运行完一个程序所需内存的大小。
7) n: 数据规模
8) k: “桶” 的个数
9) In-place: 不占用额外内存
10) Out-place: 占用额外内存

